![]()
TrustedFirmware OpenCI Users Guide
Table of Contents
- User Guide
- LAVA documentation
- Pipeline description
- CI Scripts overview
- TF LAVA Instance
- Local LAVA instance set up
- New device enablement in LAVA
- Board setup
- SQUAD
- Staging Trusted Firmware System
- Uploading files into shared repository
- FVP Docker Images
- Non-public build dependencies
- Misc Info
User Guide
This guide briefly explains how to use and contribute to the Trusted Firmware project, in particular the Trusted Firmware-A and Trusted Firmware-M.
How to Contribute to this Document
As a community project, help in all areas is greatly appreciated. If while using this document, issues are found or content can be improved, please follow the steps in this section to add your improvements to this document:
Note the steps were validated using Ubuntu 20.4. Other versions/OS's may need to be adjusted for.
- This document's source repository is located here
- First, you must authorize your account by navigating here and clicking "Authorize." This action will redirect you to the TrustedFirmware Review Dashboard. Make sure you're signed in!
- Now click the "Browse" tab and click "Repositories"
- Navigate to the
ci/tf-ci-users-guiderepository and click on it. You will land on the admin page for the TF CI Users Guide - On the admin page in your browser, go to the settings page and then navigate to the SSH Keys section.
- Add your credentials
- Since we will be using ssh, open a terminal and use the
ssh-keygencommand in your ~/.ssh directory to create a new keypair. Note you can use an existing key if you already have one. - Still in the terminal, navigate to your ~/.ssh directory and copy the
id_rsa.pubkey. - Back in your browser under the admin --> SSH Keys, in the
New SSH Keyfield, paste theid_rsa.pubkey into the entry, give it a name and save it.
You are now ready to set up your local environment
- From a terminal, ensure that you have git and git-review set up:
sudo apt-get update
sudo apt install git
sudo apt install git-review
(This may install any required dependencies automatically.)
- set up your environment using
git configto get your user.name, user.email, etc. - create your UsersGuide working directory and navigate to it.
- Back in the Gerrit dashboard for the Users Guide, found here, click on the
SSHtab. - On this page, copy the git clone example entry found in the
Clone with commit-msg hookfield. This will be used on your local machine to clone the document that you can edit. - Create and navigate to the local working directory and paste the above git clone command to clone the repo into your working directory.
- Make your edits to the docs/index.md file using the Markdown syntax. Using a markdown editor such as Remarkable can be helpful here. Save the file and you're ready to create a pull request to the master repo.
- From your terminal, use
git add docs/index.mdto prep the modified file for the Gerrit review / PR. - From the terminal, use
git commit -sthat will take you to an editor for sign-off. Add your comment, save, and exit. - From the terminal, enter
git reviewto submit the pull request for the review to Gerrit.
How to Contribute Code
The Trusted Firmware core projects, TF-M and TF-A, are both open source projects and both share the same way to accept user contributions. Code changes, commonly known as patches or patchsets, are git-tracked so once the corresponding project is cloned, all content (history of previous patches which now are commits) is available at the user's machine.
TF projects use Gerrit https://review.trustedfirmware.org/ as a centralized system to push, update and review patches. Contributors must push their patches to gerrit, so CI and reviewers can see the proposed change. One can see the open ones at https://review.trustedfirmware.org/q/status:open.

Once a patch is approved, one of the core maintainers merges it into the repository through Gerrit. The same cycle is repeated for every patch, where a patch series may be merged in one step.
Mailing lists (TF-A, TF-M) are used to communicate latest news and also it is the main channel for users to post questions or issues, so it is a good idea to subscribe to these. Note, the mailing lists are not intended for patch reviews, so patches should go into Gerrit and news/questions/issues through the mailing lists.
Gerrit Setup
Once the project is cloned, there are some two extra steps to setup gerrit properly:
- Setting up the gerrit remote repository
- Git-review package installation
For example, under the TF-A project, use the following command to add the remote:
$ git remote add gerrit ssh://<gerrit user>@review.trustedfirmware.org:29418/TF-A/trusted-firmware-a
For TF-M, the same command applies except that the remote's url is a bit different:
$ git remote add gerrit ssh://<gerrit user>@review.trustedfirmware.org:29418/TF-M/trusted-firmware-m
As a safety check, run the command git remote -v and make sure gerrit remote is present.
The next step is to install the git-review package in your corresponding Linux distribution. For example, on Ubuntu this would be:
$ sudo apt install git-review
and finally define the gerrit remote to be used with the following command
$ git review -r
If no issues are found at this point, you should be ready to start contributing to the project!
Commit and review
No matter what change you want to make in any repository, one needs to create one or more commits into a local branch before submission. All commits must have ‘Signed-off-by’ and ‘Change-id’ strings in the commit description otherwise submission fails. The ‘Signed-off-by’ is introduced explicitly by the user (git commit -s) and the ‘Change-id’ automatically created by the git-review plugin.
Patches should be atomic, just targeting one task. A commit’s subject should answer the question ‘what changed’ and the commit’s description answers the question ‘why it changed’. Be clear and always use present verbs, i.e use Add instead of Adding.
Once your commits are ready, type
git review
This command takes care of all the internal commands needed to send the patch to Gerrit, as seen below:

Once a patch is submitted, you must include one or more reviewers. The question then raises: who should I add as a reviewer? One simple approach would be to look at the git history of the files you are modifying, and look for authors who have committed recently.
git log <path to file>
Once reviewers are included, you would probably get some feedback pretty soon. TF projects are quite active but in case you do not get any activity in a couple of days, reply from Gerrit indicating that you would like some feedback. Take the time to understand and review every comment and response properly, do corrections and update the patch promptly if required. Keep polishing the patch until all feedback/observations are resolved. A good practice is to create a new branch for each patch update (suffix a version number on the branch name) so one can switch back and forth between patch versions. CI output and reviewers’ comments are reflected in gerrit and email (the one that appears in your patch metadata), so be sure to check any of these after submission.
More details about Gerrit can be found in the upstream documentation: https://review.trustedfirmware.org/Documentation/index.html
From the maintainer's POV
All CI is done with Jenkins at https://ci.trustedfirmware.org/. There are lots of jobs, so as a first impression, it may seem difficult to follow the CI flow. The Pipeline Description section describes each project’s CI in detail.

Each project have different CI jobs and scripts hosted in the following repos. For example, TF-A and TF-M are in the list below:
- TF-A CI Jobs https://git.trustedfirmware.org/ci/tf-a-job-configs.git/
- TF-A CI Scripts https://git.trustedfirmware.org/ci/tf-a-ci-scripts.git/
- TF-M CI Jobs https://git.trustedfirmware.org/ci/tf-m-job-configs.git/
- TF-M CI Scripts https://git.trustedfirmware.org/ci/tf-m-ci-scripts.git/
To see the full list of CI jobs and scripts repos for all projects in Open CI, navigate here: https://git.trustedfirmware.org/ci/
The job config repositories contain Jenkins Job Definitions, called JJB (Jenkins Job Builders) files. The CI scripts repositories host scripts that are required for the CI, i.e build scripts, static checks, etc.
Manual Job trigger
For patches that arrive at gerrit, the CI is explicitly triggered by a core maintainer. However there are cases where a particular job needs to be rebuilt. Jobs can be rebuilt at any level, from the trigger job to the job that builds or launches the LAVA execution. For example, the below picture shows a trigger job with the ‘Build with Parameters’ and ‘Rebuild last’ options. Both options allow the maintainer to change any job parameter before actually executing it.
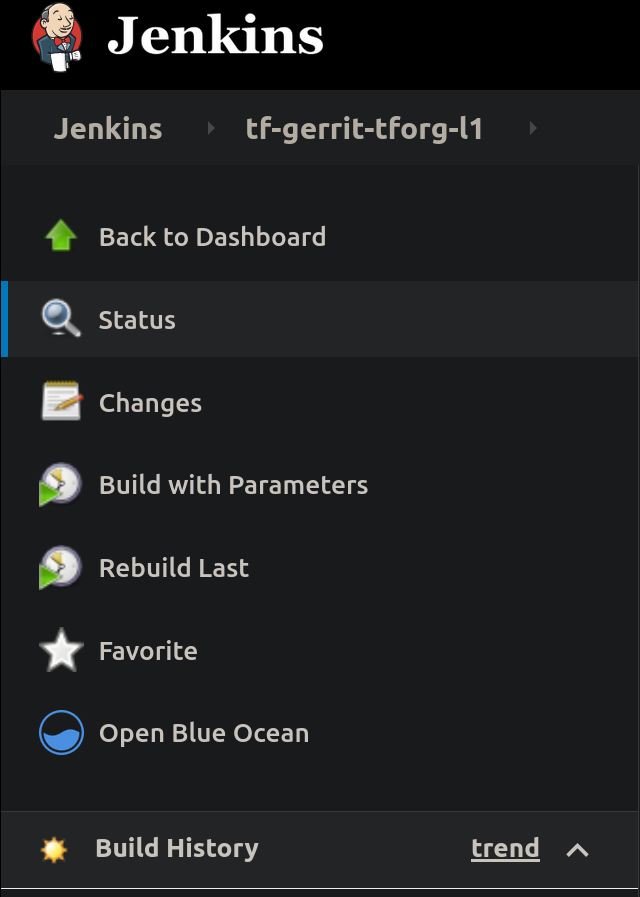
Most probably, you may want to go to a specific failed job and ‘Rebuild’
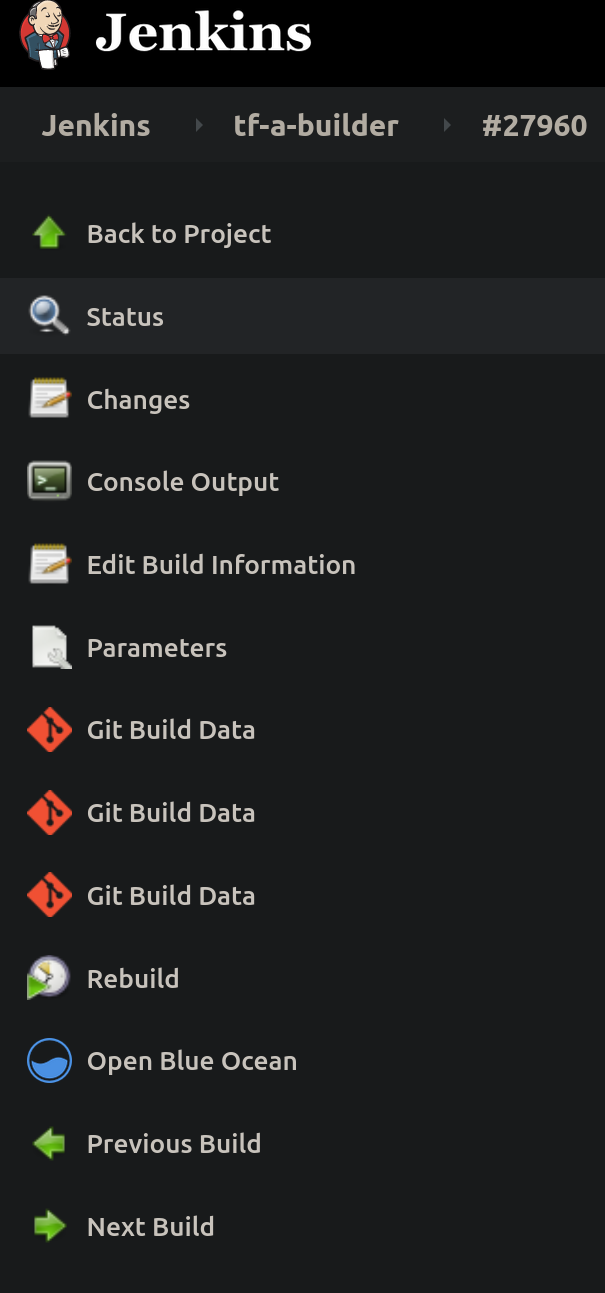
There may be many reasons to rebuild but perhaps the most trivial one is to make sure the error is valid and not a transient one. Look at the job’s console for errors.
LAVA documentation
LAVA(Linaro Automation and Validation Architecture) provides detailed documentation that can be found here.
Supported platforms
TF project supports a number of platforms in LAVA. Refer to the "Current list of available devices" section for more information.
TF-A supported platforms
Supported platforms for the TF-A project include the Juno board and FVP models (among other platforms):
- https://tf.validation.linaro.org/scheduler/device_type/juno
- https://tf.validation.linaro.org/scheduler/device_type/fvp
FVP models are virtual platforms that are able to emulate specific Arm reference designs or platforms. See the Arm documentation for more details.
These models are present on several docker images and LAVA uses these to boot and test a particular model. The specific docker image and model type are defined in the (LAVA) job definition. Docker images (containing the models) are available in a private docker registry (987685672616.dkr.ecr.us-east-1.amazonaws.com) that LAVA has access to. At the time of this writing, these are the docker image names:
- fvp:fvp_base_revc-2xaemv8a_11.12_38
- fvp:foundation_platform_11.12_38
- fvp:fvp_arm_std_library_11.12_38
Tag name, i.e. fvp_base_revc-2xaemv8a_11.12_38, corresponds to the particular model download from https://developer.arm.com/tools-and-software/simulation-models/fixed-virtual-platforms.
TF-M supported platforms
At the time of writing, TF-M LAVA devices are:
- mps https://tf.validation.linaro.org/scheduler/device_type/mps
- musca_b https://tf.validation.linaro.org/scheduler/device_type/musca-b
- qemu https://tf.validation.linaro.org/scheduler/device_type/qemu.
How to navigate tf.validation.linaro.org
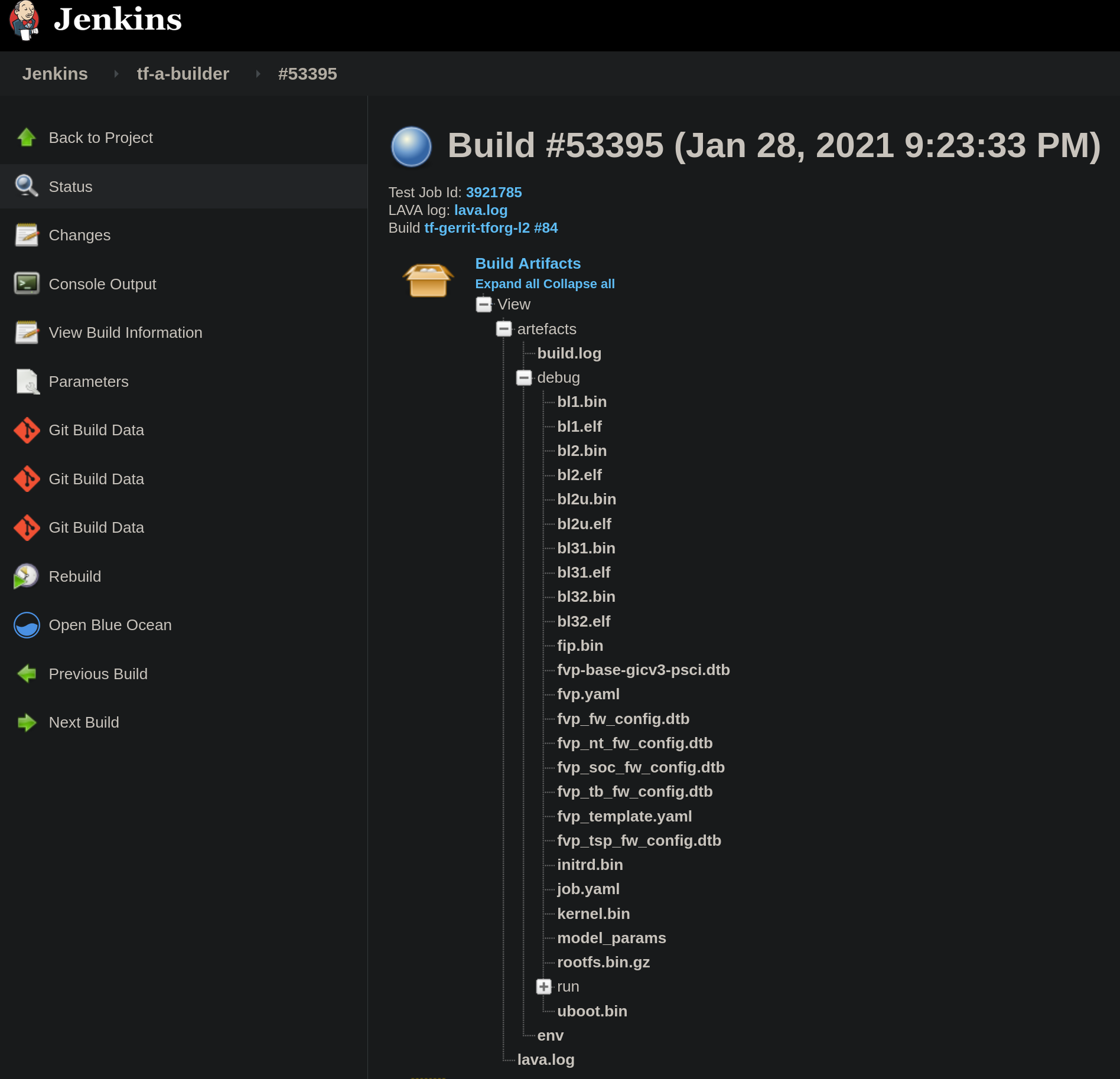
All LAVA jobs triggered by Jenkins are executed at the TF LAVA lab instance. The Jenkins jobs that launch LAVA jobs are: tf-a-builder and tf-m-lava-submit. The Jenkins jobs contain the corresponding LAVA id which can be used to find the corresponding job at https://tf.validation.linaro.org/. In case of tf-a-builder job, the LAVA log itself is fetched from LAVA lab and attached to the job as seen below:

At the https://tf.validation.linaro.org/scheduler/alljobs link, one can go to a particular job to check results directly from LAVA:

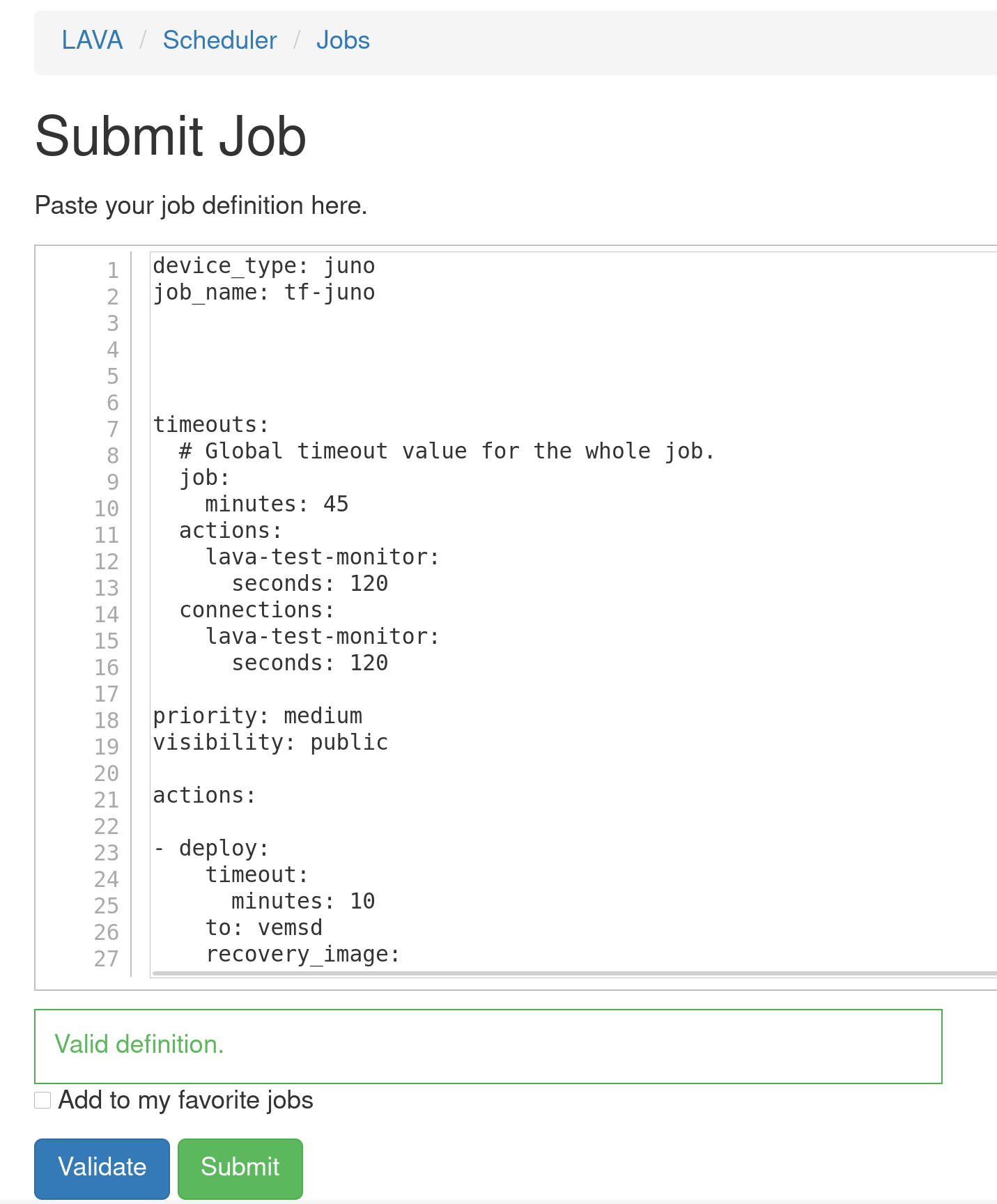
One useful feature is the possibility to resubmit jobs: this enables the user to quickly modify a job definition and test it without the need to retrigger the full build from Jenkins:
How to read a job and investigate results
The entrypoint to investigate a job failure is looking at the job’s landing page, i.e. https://tf.validation.linaro.org/scheduler/job/74086

Depending on the device type and job definition, the output can vary considerably. One can filter out relevant logs by clicking the different log levels. As in any system, failures can occur at any time and for different reasons, i.e introduced by a user's patch or scripts/infrastructure. In any case, a core maintainer should monitor and report or fix it accordingly.
Pipeline description
The TF Open CI is divided into two separate pipelines, each handling the respective project (TF-A vs TF-M). Each is different in design so we describe each separately.
TF-A CI pipeline description
At the time of this writing, there are two (mostly) identical CIs:
- Internal CI aka Legacy CI: https://jenkins.oss.arm.com/, running inside Arm (not accessible outside)
- Open CI: https://ci.trustedfirmware.org/
These are two CI instances running in parallel but in different environments: the internal CI runs in a single node (master node) while the Open CI in multiple nodes (docker nodes). In the near future, only the Open CI will be running once all the internal CI features are fully migrated.
Below is a general picture of the Trusted firmware A CI flow. Top boxes are Jenkins jobs, except those with .sh extensions.

The first job, the trigger-job, can be any job defined below, each covering a set of platforms and build/run configurations through test groups (TEST_GROUPS), ultimately split as test descriptions (TEST_DESC). A test description is tested by tf-a-builder job and a LAVA job is launched once artifacts are ready to be consumed.
In terms of the trigger source, jobs can be classified by either Gerrit or scheduled:
-
Gerrit:
- tf-a-gerrit-tforg-l1: multijob, Allow-CI+1, TF-A
- tf-a-gerrit-tforg-l2: multijob, Allow-CI+2, TF-A
- tf-a-tftf-gerrit-tforg-l1: multijob, Allow-CI+1, TF-A-tests
- tf-a-tftf-gerrit-tforg-l2: multijob, Allow-CI+2, TF-A-tests
-
Scheduled:
- tf-a-daily: - scheduled daily
All the above jobs rely on downstream jobs:
- tf-a-main: multijob, TF-A and TF-A-tests
- tf-a-coverity: freestyle, runs coverity scan
- tf-a-static-checks: runs Arm static code checks
- tf-a-ci-gateway: split a test group (TEST_GROUPS) into multiple ‘.test’ files, each representing a test description (TEST_DESC)
- tf-a-builder: freestyle, builds the package and launch a LAVA job
Any job can be triggered manually by authorized users. Gerrit jobs are those triggered by assigning labels to a review, either ‘Allow-CI+1’ or ‘Allow-CI+2’, and track a particular project, either TF-A https://git.trustedfirmware.org/TF-A/trusted-firmware-a.git/ or TF-A tests https://git.trustedfirmware.org/TF-A/tf-a-tests.git/. The following screenshot shows an example of the tf-a-gerrit-tforg-l1 job at the Jenkins instance:

The tf-a-gerrit-tforg-l1 indicates the tracking project (tforg), and the level (l1). Levels indicate testing depth (test descriptions coverage) and are used in different phases in the development phase as seen below:

The job tf-a-daily runs daily, uses the latest code (the HEAD commit) and triggers two jobs: tf-a-main and tf-a-coverity. The job tf-a-main is the one covering most platforms so it takes longer to complete (approximately 1.5 hours)

Notice that the tf-a-main job also triggers tf-a-static-checks, the job that launches project-related static checks (copyright presence, headers in alphabetical order, line endings, coding style and banned APIs) and execute Clang static analyzer (scan-build).
The job tf-a-coverity runs the Coverity static code check and reports metrics (defects) at https://scan.coverity.com/projects/arm-software-arm-trusted-firmware?tab=overview.
The job tf-a-builder is the builder job and its execution is containerized inside docker-amd64-tf-a-bionic defined at https://git.trustedfirmware.org/ci/dockerfiles.git/ repository. Anyone can fetch it with the following command and use it for local compilation
docker pull trustedfirmware/ci-amd64-ubuntu:bionic
The result of tf-a-builder is a set of artifacts: binaries, build log, environment files, etc.
In particular, if build produces a LAVA definition file, job.yaml, a LAVA job is launched through SQUAD https://qa-reports.linaro.org/tf/. Once the LAVA job finishes, jenkins fetches the log from LAVA and stores it in the corresponding jenkins job. It is worth mentioning that not all tf-a-builder jobs produce a LAVA job, i.e fvp model not supported, ‘nil’ run configuration provided in the test description, static check, etc. however most FVP and Juno produce one. One can see all executed LAVA jobs at https://tf.validation.linaro.org/scheduler/alljobs.
Finally, depending on the CI execution outcome, this is reflected in Gerrit as ‘TrustedFirmware Code Review’ comments:

Results from those LAVA executed jobs on behalf of the corresponding gerrit patch are also reflected in Gerrit:

In case of a job failure, it is more likely that you want to investigate the issue starting at the Gerrit job, then following the CI job chain starting from the trigger job (top-bottom approach): 1. analyze results from the Gerrit job, 2. use the report table produced by each tf-a-ci-gateway job, 3. the tf-a-builder job and finally 4. the tf-a-builder’s console log. Looking at the following screenshots should help clarifying this concept.
- Gerrit job level:

- tf-a-ci-gateway level:

- tf-a-builder level:

- tf-a-builder’s console log view:

TF-M CI pipeline description
Job classification
TF-M jobs can be found at https://ci.trustedfirmware.org/view/TF-M and classified by use cases.
Per-patch job
Per-patch job is triggered by option Allow-CI in the Reply button of each Gerrit review item to verify TF-M patches before merge. The job votes to Gerrit with a Code Review +1 if it passed and Code Review -1 once failed.

Following checks are covered in per-patch job:
- Static check: Include tf-m-cppcheck (using CppCheck), tf-m-checkpatch (using CheckPatch) and tf-m-static-checks (checking trailing spaces, etc.), which are three independent jobs.
- Build configs: Build TF-M images with tf-m-build-config jobs in parallel. Each job builds one config. Configs built by per-patch job are listed here.
- Build docs: Build TF-M user guide and reference manual based on the current patch.
- Test images: Run TF-M images on target devices which are managed on LAVA server. Tf-m-build-config job will trigger tf-m-lava-submit job to start a LAVA test on the supported device, to verify the image built by tf-m-build-config job. Tests on following devices are covered in per-patch job: AN519 FVP, AN521 FVP, AN552 FVP, Corstone1000 FVP, STM32L562E_DK and Cypress/PSOC64.
Every check job generates a vote to Gerrit with corresponding job link. There wil be a final Verified +1 from TrustedFirmware Code Review once all checks passed. Otherwise a Verfied -1 will be voted.

Note: If any dependency version (MbedTLS, MCUBoot, etc.) is changed in TF-M patch, Allow-CI will automatically verify the TF-M patch together with the dependency in new version. If there is an unmerged patch in other TF-M repos, such as tf-m-tests or tf-m-extras, update the dependency version in TF-M configuration with the commit ID of that patch. And then trigger Allow-CI on the TF-M patch to update dependency version. The unmerged patch in dependency repo can also be verified together with the TF-M patch.
Nightly job
Nightly job is daily scheduled to check the health of latest HEAD on TF-M master branch. Email notification will be sent to tf-m-ci-notifications mailing list once the job failed. TF-M user guide posted to trustedfirmware.org is also daily generated by tf-m-build-docs-nightly in nightly job.

Following checks are covered in nightly job:
- Build configs: Configs built by nightly job are listed here.
- Build docs: Build TF-M user guide and reference manual based on the latest TF-M master branch and posted to trustedfirmware.org.
- Test images: Tests on following devices are covered in nightly job: AN519 FVP, AN521 FVP, AN521 FPGA, AN521 QEMU, AN552 FVP, Corstone1000 FVP, STM32L562E_DK, NXP/lpcxpresso55s69 and Cypress/PSOC64.
Release job
Release job is scheduled bi-weekly to make sure the latest TF-M on master branch could pass all release tests. It will also be manually triggered for release branch during release stage.

Following checks are covered in release job:
- Build configs: Configs built by release job are listed here.
- Build docs: Build TF-M user guide and reference manual based on the current HEAD of master/release branch.
- Test images: Tests on following devices are covered in release job: AN519 FVP, AN521 FVP, AN521 FPGA, AN521 QEMU, AN552 FVP, Corstone1000 FVP, STM32L562E_DK, NXP/lpcxpresso55s69 and Cypress/PSOC64.
Code coverage job
Code coverage job is scheduled weekly to monitor the code coverage of tests in the latest TF-M on master branch.

Following configs are covered in code coverage job:
- Build configs: Configs built by code coverage job are listed here.
- Test images: Tests on AN521 FVP will be traced by qa-tool to get the code coverage data.
The final code coverage data is available in the job artifacts at merged_report/index.html
Extra build job
Extra build job is daily scheduled to check whether the latest TF-M could be correctly built for platforms supported by TF-M. Images are only built but not tested in this job. Configs built by extra build job are listed here.

Job logs
For detailed logs, please go to the job link and choose Console Output at the left column of the page.

And then search for the key word needs to be checked.
For example, search for "fail" to see the error cause.

Or seach for config name that needs to be checked.

- NOTE: If LAVA test is run on FVP, LAVA link is only accessible to authorized users. Please check TFM LOG to find the test result. If access to LAVA job is necessary, please contact tf-openci@lists.trustedfirmware.org for help.

Job artifacts
Artifacts archived by each job can be found in Build Artifacts.
- Build binary: TF-M build binary of each config is available in corresponding tf-m-build-config job.
- Result summary: Summary of all build and test results in both csv and html formats are available in artifacts of tf-m-build-and-test, tf-m-nightly and tf-m-release correspondingly for per-patch, nightly and release jobs.

Build environment
Toolchain
There are different versions of toolchain installed in CI workspace. Each tf-m-build-config job selects the needed version automatically. To check the chosen toolchain, search for the name of toolchain (arm-none-eabi-gcc, armclang) in the job console.

Dependencies
- Dependency tools installed in TF-M CI workspace are listed here.
- Python packages installed in TF-M CI workspace are listed here.
Code coverage support
Both TF-A and TF-M jobs support performing code coverage analysis. Mechanisms for requesting this analysis are different:
- TF-A: There are special test groups which enable code coverage,
e.g.
tf-l3-code-coverage. - TF-M: Setting
CODE_COVERAGE_ENparameter of a job toTRUE.
There is a following path to produce a code coverage report:
- If code coverage is enabled, FVP job in LAVA is run with a special coverage/instruction tracing plugin, which at the end of FVP execution outputs address of each instruction which was executed. It should be noted that as of now, code coverage support relies on this FVP plugin and is available only for the FVP targets.
- A custom utility
post-processes this trace file and converts it into the input format
for the
lcovcode-coverage tool. lcovis used to generate a code coverage report in the HTML format, which is published as an artifact together with other deliverables of a build.
Individual job builds oftentimes cover only a particular configuration (hardware
platform, testsuite, etc.). Thus, code coverage produced from a single build
is partial, exercising only a subset of the project code. To address this
limitation, there is also a support to overlap multiple individual code coverage
reports to produce a "collective" or "merged" report, better representing
coverage of the entire project. An "umbrella" CI job (tf-a-ci-gateway for
TF-A, tf-m-build-and-test for TF-M) automatically produces a merged report
if code coverage is enabled and there are 2 or more configurations are built
by its sub-jobs.
Static analysis
A number of static analyses are performed by OpenCI jobs. Basic examples are checking format of a commit message, code style conventions and usage of deprecated APIs. More deep and involved analyses are described below.
Coverity analysis
Coverity is a proprietary
cloud-based static analisys tool which helps to find bugs and issues
in C (etc.) based projects. Both TF-A and TF-M are run thru Coverity
analysis, using jobs tf-a-coverity and tf-m-coverity.
TF-A Coverity stats can viewed at https://scan.coverity.com/projects/arm-software-arm-trusted-firmware (a login required, e.g. via a Github). Individual defects can be viewed by requesting being added to the project.
MISRA analysis using ECLAIR tool
MISRA C is a well-known industry standard for ensuring system quality and safety. The Trusted Firmware project aspires to adhere to the MISRA guidelines as much as reasonably possible, with the help of its stakeholders and contributors. Note that to warrant a particular level of MISRA C compliance, a specific product must undergo MISRA C certification. An example of a "specific product" in the context of Trusted Firmware would be a particular version of Trusted Firmware configured for a particular target system, built with a specific toolchain, etc. The upstream Trusted Firmware project is not a specific product, but rather a framework / umbrella codebase with high number of configuration choices. The upstream project thus does not seek for MISRA C certification itself. Instead, the aim is to provide largely MISRA C compliant codebase, allow contributors to improve the level of compliance, and help downstream users / vendors to proceed with the formal MISRA C certification if they choose so.
Bugseng ECLAIR is a proprietary advanced system for in-depth MISRA analysis and reporting. One of its distinguishable features is ability to work in "differential" mode - to report issues which appeared (or were resolved) in one codebase comparing to another. This allows to use it to analyze individual patches prior to them being merged to the Trusted Firmware projects.
ECLAIR is a complex and advanced system with many features and configuration parameters. The manual is included in the ECLAIR distribution, but is otherwise not publicly available or redistributable. Some aspects of ECLAIR usage are covered in the FAQ which is available online. Other documents and whitepapers are available at https://www.bugseng.com/content/documentation.
ECLAIR can generate reports in a number of formats. For Trusted Firmware, we generate plain-text and HTML reports. HTML reports are interactive and allow to "drill down" thru the codebase to explore individual issues. There're also search, filtering, and basic diagramming capabilities.
At this time, a pilot implementation of ECLAIR testing is available for TF-A. It should be noted that primary purpose of ECLAIR is end-to-end preparation of a particular software product to the MISRA compliance testing. A "software product" in means very specific and statically defined codebase and its configuration (down to toolchain used to build it). This is different from from the nature of the Trusted Firmware projects: they are essentially frameworks, supporting a large number of platforms, and even larger number of configuration options, both pertinent to general configuration of TF, or to a particular platform. Such a nature of TF poses a challenge of testing it with a tool like ECLAIR: we are effectively dealing with superimposition of hundreds of products, and testing those is problematic both from the performance (too much time to test all configs) and reporting (too much repetetive content) points of view. This necesitates testing only a subset of platforms and options. Increasing number of tested configurations, while producing easy to understand and act on reports is a subject of future work.
There are following ECLAIR jobs for TF-A:
- tf-a-eclair-daily - whole codebase testing, with multiple configurations, running daily. This job is useful for tracking "absolute" figures of MISRA issues in the codebase, as well as following trends.
- tf-a-eclair-delta -
this job tests patches submitted to Gerrit, and is intended to help with
reviews, the aim being that a patch doesn't introduce new
MISRA issues, even if the codebase in general has some number of issues,
which can't be addressed short-term (or at all). The job is triggered by
assigning
Allow-CI+1/Allow-CI+2label to a review, similar to other CI jobs testing individual patches. To provide quick turnaround and reasonable system load, this job is currently builds just a single TF-A configuration. This may change in the future when more configurations are added to the workflow.
Both jobs are structured as matrix jobs, with the single axis being a TF-A platform. ECLAIR reports are publish as job artifacts. For each job, they are:
-
tf-a-eclair-daily:ECLAIR/full_txt- "Full TXT" report ("full" means that both codebase-level summaries and individual file reports are provided)ECLAIR/full_html- "Full HTML" report (likewise, both codebase summaries are provide, and it's possible to "drill down" to individual files, seeing the full source code, with MISRA annotations). The report is interactive and with simple diagramming capabilities, allowing to group issues by different criteria.index.html- Index file, providing quick access to the text report and different presets of the HTML report. Of the particular interest is "Report by issue strictness", which shows breakdown of the Mandatory/Required/Advisory issues, according to the MISRA classification.
-
tf-a-eclair-delta:diff_output/- The primary differential text report generated by ECLAIR. The issues are groupped by a MISRA rule, all issues pertinent to a particular rule (across the codebase), residing in one file, named likeMC3R1.R20.9.add.etr, whereMC3R1.R20.9is rule identifier,addmeaning this file lists issues added by the patch, whiledel- issues resolved by the patch.misra_delta.txt- Reports fromdiff_output/, concatenated into a single file. Contents of this file also gets posted as a comment to Gerrit patch.new_issues_html/- HTML report for newly added issues.resolved_issues_html/- HTML report for resolved issues (what you see here is the state of the source code before the patch).index.html- Index file, providing quick access to the reports above.
Browsing and understanding ECLAIR reports
ECLAIR reports are information and functionality packed, and besides familiarity with the MISRA standard itself and the ECLAIR manual, require some practice to understand and use.
One good way to learn how to use and understand reports is to watch instruction videos provided on the Bugseng Youtube channel.
Some useful videos are listed below. Before reviewing them, it is useful to know some basic terminology related to ECLAIR:
-
a report - A report is an entry in a report document produced by ECLAIR. It can be seen as a synonym of "issue", but a different term is used to emphasize that not every entry produced by ECLAIR is formally an "issue" or "violation" of a specific MISRA rule. See e.g. "information" report kind below.
-
report kind (violation, caution, information): A "violation" is a type of issue which was formally verified by ECLAIR to violate a corresponding MISRA directive/rule. "Caution" kind is assigned to issues which could not be 100% formally verified by ECLAIR, at yet it suspects there may be an issue. Put it another way, there can be a possibility of false positive in case of "caution". Finally, "information" is not an issue with the code per se, but some additional information along the lines of "know the codebase better". These are output by ECLAIR because the underlying spirit of the MISRA specification is that to produce a safe/verified code, as much as possible information about it should be known and understood. Different kinds of issues are useful for different purposes (and less useful for other). For example, for crude quantitative totals, it would be counter-intuitive and misleading to include number of "information" reports.
-
issue severity (mandatory, required, advisory) - this is actually MISRA classification, each MISRA directive/rule (and thus issues related to them) is classified as one of 3 severeties above.
List of introductory videos for using reports:
Example of browsing an (HTML) report, filtering it by different criteria, and understanding what this means. The video is recorded against an older ECLAIR release, so there are small differences in the report look. The video starts showing how to use ECLAIR GUI to produce a report, but the link above starts with a timecode where a report is discussed. The video discusses in particular what ECLAIR's "violation" vs "caution" vs "information" means.
Browsing a report, understanding individual items in it, and addressing them in a project.
Introduction and usage of "sunburst chart" in the ECLAIR reports.
There is also available a "cheat sheet" for using the main report page with a sunburst chart.
{kind=link}
The TF Jenkins Job Builder (JJB) configs
The TF project uses YAML files to define Jenkins jobs using Jenkins Job Builder (JJB): https://docs.openstack.org/infra/jenkins-job-builder/definition.html. Jobs currently defined for both projects are at https://git.trustedfirmware.org/ci/tf-m-job-configs.git/ and https://git.trustedfirmware.org/ci/tf-a-job-configs.git/. Job triggers are special types of jobs that listen to certain gerrit events. For example the job https://git.trustedfirmware.org/ci/tf-a-job-configs.git/tree/tf-a-gerrit-tforg-l1.yaml triggers every time a TF-A maintainer ‘Allows +1’ the CI to execute as defined the job’s trigger section:
...
triggers:
- gerrit:
server-name: review.trustedfirmware.org
trigger-on:
- comment-added-event:
approval-category: "Allow-CI"
approval-value: 1
projects:
- project-compare-type: PLAIN
project-pattern: TF-A/trusted-firmware-a
branches:
- branch-compare-type: PLAIN
branch-pattern: integration
...
JJBs and Jenkins Jobs
JJB defines the behaviour of a Job through a YAML file, where Jenkins use these to create jobs (it is similar to Class and Object concepts in Object Oriented Programming). For example this is JJB of TF-A Level1 trigger: https://git.trustedfirmware.org/ci/tf-a-job-configs.git/tree/tf-gerrit-tforg-l1.yaml which is instanciated at https://ci.trustedfirmware.org/job/tf-gerrit-tforg-l1/. Similar pattern applies for the rest of the JJB files.
Calling CI scripts from JJB jobs
JJB files themselves do not do much unless they execute something useful. CI scripts are kept in separate repositories depending on the project. Below is the relationship between jobs and scripts repositories per project
- TF-A CI Jobs https://git.trustedfirmware.org/ci/tf-a-job-configs.git/
- TF-A CI Scripts https://git.trustedfirmware.org/ci/tf-a-ci-scripts.git/
- TF-M CI Jobs https://git.trustedfirmware.org/ci/tf-m-job-configs.git/
- TF-M CI Scripts https://git.trustedfirmware.org/ci/tf-m-ci-scripts.git/
In general, Jenkins jobs call scripts, the latter do the corresponding task. For example, below is shown again CI flow for the TF-A project
Where builders.sh is just a setup script (located at TF-A jobs repo) that finally calls run_local_ci.sh script located CI scripts repo, which is the entrypoint of the script execution. The run_local_ci.sh in turn calls others scripts that finally build the package.
CI Scripts overview
TF-A CI scripts overview
The TF-A CI repository https://git.trustedfirmware.org/ci/tf-a-ci-scripts.git/ contains several folders and scripts for different purposes but we will not describe each one. Instead we will overview build package operation. Building a package means building (compiling) a specific platform with certain build parameters and post-build setup tasks, both indicated in a single test configuration (string or filename). The operation is depicted in the following diagram:

The test configuration concisely specifies a single test: what set of images to build, how to build them, and finally, how to run a test using the aforementioned images. A test configuration is a specially-named plain text file whose name comprises two parts: the build configuration and the run configuration.
The test configuration file is named in the following format:
{tf-build-config | nil}[,tftf-build-config]: { run-config | nil}
That is, it contains:
- Mandatory build configuration for TF, or nil if TF is not required to be built.
- Optional build configuration for TFTF;
- Mandatory run configuration, or nil for build-only configs.
The TF and TFTF build configs are separated by a comma; the build and run configs are separated by a colon. The test configuration is consumed by the build script , and produces a build package. For example, the test configuration fvp-default,fvp-default:fvp-tftf-fip.tftf-aemv8a-debug chooses:
- To build TF with the fvp-default config;
- To build TFTF with the fvp-default config;
- To apply run config fvp-tftf-fip.tftf-aemv8a-debug
Build configurations are plain text files containing build parameters for a component; either TF or TFTF. The build parameters are sorted and listed one per line, and would appear on the component's build command line verbatim. Up to two build configurations can be specified – one for TF (mandatory), and another one for TFTF (optional). If the test doesn't require Trusted Firmware to be built (for example, for a TFTF build-only configuration), it must be specified as nil.
For example, the TF build config fvp-aarch32-tbb-mbedtls-rsa-ecdsa-with-ecdsa-rotpk-rsa-cert has the following contents as of this writing:
AARCH32_SP=sp_min
ARCH=aarch32
ARM_ROTPK_LOCATION=devel_ecdsa
CROSS_COMPILE=arm-none-eabi-
GENERATE_COT=1
KEY_ALG=rsa
PLAT=fvp
ROT_KEY=plat/arm/board/common/rotpk/arm_rotprivk_ecdsa.pem
TF_MBEDTLS_KEY_ALG=rsa+ecdsa
TRUSTED_BOARD_BOOT=1
Build configs are located under tf_config and tftf_config subdirectories in the CI repository.
As described above, the build configuration describes what components to build, and how to build them. Before a set of images can be exercised through the test, the CI usually needs to execute a sequence of steps that are necessary to set up the test environment. These steps largely depend on the specific nature of the test at hand, the platform to be run on, etc. These steps are related to but decoupled from the build configs and are defined in run configurations. Almost all tests run in the CI mandatorily require a certain combination of steps above, some others optional. Because of the variability in applying the steps, and to avoid duplication, common steps are made available as standalone script snippets, called fragments. Individual fragments can be strung together to form a Run Configuration. Run config fragments are located under run_config subdirectory in the CI repository.
For example, the following test configuration
tftf-l2-extensive-tests-fvp/fvp-tspd,fvp-extensive:fvp-tftf-fip.tftf-cortexa57x4a53x4-tspd
Produces the following build configs
Trusted Firmware config:
CROSS_COMPILE=aarch64-none-elf-
PLAT=fvp
SPD=tspd
Trusted Firmware TF config:
CROSS_COMPILE=aarch64-none-elf-
PLAT=fvp
TESTS=extensive
And the following run config fragments
fvp-tftf
fvp-fip.tftf
fvp-cortexa57x4a53x4
fvp-tspd
Producing the following (release) build package
.
├── artefacts
│ ├── build.log
│ ├── debug
│ │ ├── bl1.bin
│ │ ├── bl1.elf
│ │ ├── bl2.bin
│ │ ├── bl2.elf
│ │ ├── bl2u.bin
│ │ ├── bl2u.elf
│ │ ├── bl31.bin
│ │ ├── bl31.elf
│ │ ├── bl32.bin
│ │ ├── bl32.elf
│ │ ├── cactus.bin
│ │ ├── cactus.dtb
│ │ ├── cactus.elf
│ │ ├── cactus_mm.bin
│ │ ├── cactus_mm.elf
│ │ ├── el3_payload.bin
│ │ ├── fip.bin
│ │ ├── fvp-base-gicv3-psci.dtb
│ │ ├── fvp_fw_config.dtb
│ │ ├── fvp_nt_fw_config.dtb
│ │ ├── fvp_soc_fw_config.dtb
│ │ ├── fvp_tb_fw_config.dtb
│ │ ├── fvp_template.yaml
│ │ ├── fvp_tsp_fw_config.dtb
│ │ ├── fvp.yaml
│ │ ├── ivy.bin
│ │ ├── ivy.dtb
│ │ ├── ivy.elf
│ │ ├── job.yaml
│ │ ├── model_params
│ │ ├── ns_bl1u.bin
│ │ ├── ns_bl1u.elf
│ │ ├── ns_bl2u.bin
│ │ ├── ns_bl2u.elf
│ │ ├── quark.bin
│ │ ├── quark.dtb
│ │ ├── quark.elf
│ │ ├── run
│ │ ├── tftf.bin
│ │ └── tftf.elf
│ ├── env
│ └── release
.
.
├── fvp_template.yaml
├── fvp.yaml
├── job.yaml
├── lava_model_params
├── tmp.FlNca0PGGF
├── tmp.KMJFcZ0Zr6
├── tmp.ku5nXd85b4
├── tmp.mCaqKgvgfT
└── tmp.Sv3zjKIWz7
Ultimately, the job.yaml file above is the LAVA job definition, which contains the information required by LAVA (artefacts’ URL, model params, container containing the model, etc.) for a correct job execution.
TF-M CI scripts overview
TF-M Open CI has two repos:
- tf-m-job-configs: Job configs in Jenkins Job Builder format.
- tf-m-ci-scripts: Scripts that run in Jenkins to build and test TF-M.
CI scripts use 2 tools to generate commands:
- Build helper: Generate commands for building TF-M images.
- LAVA helper: Generate config files for LAVA instance to run TF-M images and monitor the test results.
Build helper
Build helper is a tool to generate build commands for different TF-M configs.
Config group
Build helper categorizes all the TF-M configs that are built in CI into different groups, depending on CI jobs. The config groups for each CI job are set as the default value of Filter Group, which is configured by tf-m-job-configs.

Generate commands to build TF-M image
Building TF-M image in a specific config consists of 4 steps in a tf-m-build-config job. Each step runs dedicated command. These commands are listed below in the order of build sequence. - set_compiler - cmake_config - cmake_build - post_build
Set compiler commands
There are several compilers in different versions installed in CI docker image. To select correct compiler in correct version, each single tf-m-build-config job needs to run the commands to set compiler for current configuration.
Compiler and its version are selected in the seed_params introduced in CMake config commands section. Set compiler command is to add specified compiler path into system PATH.
export PATH=$PATH:$%(compiler)s_PATH
CMake config commands
In each config group, values of following 9 TF-M build config parameters in seed_params are combined to generate all configs covered in this group.
| Parameter | TF-M CMake Build Config | Value |
|---|---|---|
| tfm_platform | TFM_PLATFORM | arm/mps2/an521, etc. |
| compiler | TFM_TOOLCHAIN_FILE | ARMCLANG_6_13 (ARMClang v6.13), etc. |
| isolation_level | TFM_ISOLATION_LEVEL | 1 / 2 / 3 |
| test_regression | TEST_BL2, TEST_S, TEST_NS | OFF / RegBL2 / RegS / RegNS |
| test_psa_api | TEST_PSA_API | OFF / IPC / CRYPTO/INITIAL_ATTESTATION / STORAGE |
| cmake_build_type | CMAKE_BUILD_TYPE | Debug / Release / Minsizerel |
| with_bl2 | BL2 | True / False |
| profile | TFM_PROFILE | profile_small / profile_medium / profile_medium_arotless / profile_large, empty string for base profile by default |
| extra_params | Other customized configs | Build config abbreviation in mapExtraParams |
For example, in config group config_profile_m_arotless, 24 configs are generated by combining values in each seed params.
config_profile_m_arotless = {"seed_params": {
"tfm_platform": ["arm/musca_b1"],
"compiler": ["GCC_10_3", "ARMCLANG_6_13"],
"isolation_level": ["1"],
"test_regression": ["OFF", "RegBL2, RegS, RegNS"],
"test_psa_api": ["OFF"],
"cmake_build_type": ["Debug", "Release", "Minsizerel"],
"with_bl2": [True],
"profile": ["profile_medium_arotless"],
"extra_params": ["", "PSOFF"]
},
"common_params": _common_tfm_builder_cfg,
"invalid": _common_tfm_invalid_configs + []
}
The combination of these 9 seed_params is filled into the build config template by Build Helper and finally generates the complete CMake config command for this config.
To add some specific CMake config parameters into the command, a map of "abbreviation: config command" is added to mapExtraParams in build_helper_config_maps.py, and the abbreviation is added to extra_params. For example, "PSOFF" in config group config_profile_m_arotless is the abbreviation of build config "-DTFM_PARTITION_PROTECTED_STORAGE=OFF ".
CMake build command
After CMake config is done, command for CMake build and install needs to be run. Typically the command is:
cmake --build <build_dir> -- install
Post build commands
If any extra command is needed by some platforms after building TF-M by CMake, the command is added to post_build. For example, Musca B1 needs to run srec_cat command to generate the final image, the command is added here.
Filter out invalid configs
To filter out specific configs from the config group, a config tuple with all the 9 seed params in sequence is added to the invalid list. Character "*" stands for all values of the corresponding config parameter. For example, in config group config_profile_s, all configs for AN519 built with GCC v10.3 in Minsizerel type is not contained in this group.
config_profile_s = {"seed_params": {
"tfm_platform": ["arm/mps2/an519", "arm/mps2/an521"],
"compiler": ["GCC_10_3", "ARMCLANG_6_13"],
"isolation_level": ["1"],
"test_regression": ["OFF", "RegBL2, RegS, RegNS"],
"test_psa_api": ["OFF"],
"cmake_build_type": ["Debug", "Release", "Minsizerel"],
"with_bl2": [True],
"profile": ["profile_small"],
"extra_params": ["PSOFF"]
},
"common_params": _common_tfm_builder_cfg,
"invalid": _common_tfm_invalid_configs + [
("arm/mps2/an519", "GCC_10_3", "*", "*",
"*", "Minsizerel", "*", "*", "*")
]
}
Config name format
To keep the config name short and clear, config tuple is converted to string in a brief format, by using abbreviations to map the long config parameters into a shorter format in build_helper_config_maps.py. The detailed conversion logic is here.
How to add new configs
To support new TF-M features, it is recommanded to add a new config group for the new feature. Following steps are needed:
-
Add new config group in CI scripts. Please take this patch for reference: https://review.trustedfirmware.org/c/ci/tf-m-ci-scripts/+/17665
-
Run the following commands locally to verify whether the new config group works as expected.
To list all configs covered in the new config group, run command:
python3 <path of tf-m-ci-scripts>/configs.py -g <group_name>
To get specific type of commands (set_compiler, cmake_config, cmake_build, post_build) for a config generated by Build Helper, run command:
python3 <path of tf-m-ci-scripts>/configs.py <config_name> -b <command_type>
To get the detailed values of each build parameters of a config, run command:
python3 <path of tf-m-ci-scripts>/configs.py <config_name> --config_params
-
Enable the new config group by adding it as the default group in job configs. Please take this patch for reference: https://review.trustedfirmware.org/c/ci/tf-m-job-configs/+/17841
-
Verify the changes on Staging CI. For details please refer to Staging Trusted Firmware System section. If any permission is needed, please contact tf-openci@lists.trustedfirmware.org for help.
LAVA helper
LAVA helper is a tool to generate config files for LAVA instance. The config files are submitted to LAVA server by Jenkins to run TF-M images on LAVA boards and monitor the test results.
All Open CI supported boards (including FVPs) are listed in lava_gen_config_map, mapped with their configurations. The values of each config are filled by LAVA helper into the corresponding jinja2 template of the platform in lava_helper/jinja2_templates.
For exmple, in MPS2 FVP template file, the path of FVP image and FVP command are set in this file. LAVA helper fills all the config values in fvp_mps2_an521_bl2 into this template file, and then submit this config file to LAVA server to start the test on MPS2 FVP.
To decide whether the test run as expected, LAVA server uses monitors to monitor the target log strings. Once the specified string is matched by LAVA monitor before timeout, it means that the test works as expected. Otherwise the tests fail.
There are 5 kinds of LAVA monitor configs defined in TF-M Open CI:
- no_reg_tests_monitors_cfg: Applied when regression tests are disabled.
- mcuboot_tests_monitor_cfg: Applied when BL2 tests are enabled.
- s_reg_tests_monitors_cfg: Applied when secure regression tests are enabled.
- ns_reg_tests_monitors_cfg: Applied when non-secure regression tests are enabled.
- arch_tests_monitors_cfg: Applied when PSA Arch tests are enabled.
These configs are categorized into 3 groups to deal with different kinds of LAVA tests:
- no_reg_tests_monitors: Consisted of monitor configs for no regression tests.
- reg_tests_monitors: According to build parameter "TEST_REGRESSION", monitor configs for regression tests of BL2, Secure and Non-Secure are correspondingly appended to this group.
- arch_tests_monitors: Consisted of monitor configs for PSA Arch tests.
How to add new platform
Platforms of trustedfirmware.org members can be added to Open CI.
To add physical boards, please contact tf-openci@lists.trustedfirmware.org for help.
To add FVP, please follow the instructions in FVP Doker Images to upload the new FVP image. If any permission or resources are needed, please contact tf-openci@lists.trustedfirmware.org for help.
TF LAVA Instance
The LAVA instance for the Trusted Firmware project is set up in Linaro Harston LAB. It consists of lava-master running on a hosted bare metal server, lava-dispatcher running on the same server. Additional dispatchers are deployed using Raspberry Pi 4 hardware. Note that this is required by certain classes of hardware not being differentiable before the OS boots, therefore a single device per dispatcher allows addressing these devices via an unique dispatcher (per device).
TF LAVA instance settings are stored in salt and ansible repositories:
- Salt repository: https://git.linaro.org/lava/lava-lab.git
- Ansible repositories:
TF LAVA instance replication
TF instance partially relies on Linaro infrastructure. Linaro’s login service (based on LDAP) is used for users authentication and logging into the TF LAVA instance. Therefore it’s not possible to replicate identical LAVA instance accounts outside of Linaro’s infrastructure. Apart from that, all configurations are stored in Salt or Ansible repositories. Replicating the remaining part of the instance can be done using Salt and Ansible tools with a new set of inventory variables.
Before an instance is ready various Ansible playbooks need to be run and, for LAVA setups, Salt needs to be run.
For Ansible, you need to go on deb-ansible host (ssh root@192.168.128.15). As root:
# (cd /srv/lava-lab; git pull)
# cd /etc/ansible/playbooks
# ansible-playbook -i ../inventory/tf lava-lab.yml
The following playbooks are used to configure all the relevant parts:
lab_sssd_auth.yml: enable LDAP authenticationlab_snmp_enable.yml: enable SNMP, and non-free/contrib apt sources (needed for working SNMP set up with APC PDUs)lab_docker.yml: install docker apt repository and docker service itselflab_aws_client.yml: enable AWS authentication with AWS to preload docker imageslab_lava_repo.yml: add LAVA apt repositorydhcp_tf.yml: for the static leases and general DHCP server configuration
Installing LAVA (worker and master) is a manual process. After that, the lava-lab.yml file takes care of setting up the correct device dictionaries, device types and health checks as configured in the separate lava-lab repository.
Until the Salt migration to Ansible is complete you will need to go on tf-master.tflab host (ssh root@10.88.16.10). As root:
# (cd /srv/lava-lab; git pull)
# salt ‘*’ state.highstate
Note: on a brand new installation, you will need to run the salt command twice. It’s due to an ordering problem in the Salt state configuration. It will be fixed by the Ansible migration.
LAVA Master
LAVA Master and dispatchers run the Debian distribution (at the time of writing, Debian 10 Buster). LAVA packages are installed from apt.lavasoftware.org repository. On top of the basic installation, LAB specific configuration is applied with Ansible.
Note: the installation of lava-server is a manual process (and still a work in progress), while other configurations are automated and described in the Ansible playbooks above.
LAVA Dispatchers
TF instance uses 2 types of dispatchers:
- x86 dispatcher running on the same hardware as LAVA master. This dispatcher hosts Fast Models (FVP), QEMU, and Juno devices.
- Arm dispatchers running on Raspberry Pi 4 hardware. This dispatcher hosts MPS2 and Musca B1 devices.
LAVA dispatchers setup is described in the LAVA documentation: https://lava.readthedocs.io/en/latest/admin/advanced-tutorials/deploying-rpi4b-as-worker/.
Upgrades
Upgrades of LAVA software are performed after each LAVA release. All dispatchers and master have to run the same version of LAVA software.
LAVA instance changes
All the changes are done by the Linaro Lab staff. They should be requested as Jira tickets with the following fields:
- Project: LSS (LAB & System Software)
- Type: Ticket
- Component: LAB
- Client Stakeholder: Trusted Firmware
Most common cases where ticket is required include:
- Adding new device to the LAVA instance
- Changing firmware on the boards that require manual action
- Adding or lifting access limitations
Current list of available devices
Up-to-date list of devices is available from the LAVA web UI. A simplified view shows only the device types. Currently, TF LAVA instance has Juno, MPS2, Musca B1 and QEMU devices.
Local LAVA instance set up
Setting up a local LAVA instance that can be used for debugging or improving LAVA code, as well as new device enablement can be done in a few ways. The easiest is to use the official LAVA’s docker-compose repository and follow the README instructions.
New device enablement in LAVA
Enabling new devices in LAVA is described in the LAVA documentation.
Board setup
Juno
More details on Collaborate page: https://collaborate.linaro.org/display/CTT/Juno
Peripherals
- Serial: Connected to serial console.
- Power:
- Ethernet: Both the front and the back interfaces need to be connected.
- Storage: SSD and USB stick (for boot image).
Deployment
After various iterations of deployment methods, the current method is loading a master image on SD card or USB stick, and booting a known good image from that. The known good image can be found here.
Troubleshooting
The most common issue with Juno is broken PDU ports. The ports get stuck in ON mode so the board never reboots and can thus not interrupt the boot loader. Another common issue is "Failed to erase old recovery image" which is generally an issue with the SD card. It is solved as follows:
- Take brand new SD card
- Use a root/sudo user to run following commands on your SD reader capable *nix device
- Run
parted /dev/DISK_ID - mklabel msdos
- mkpart
- primary
- fat16
- 1M
- 2G
- exit parted
mkfs.fat16 /dev/DISK_ID -n JUNO<details>- Download the recovery image from a health check
- Unpack and copy contents to SD card.
- Put a new card in a Juno device and run a health check. It might have
umountissues on the first try. If so, try again.
MPS2
More details in Collaborate page: https://collaborate.linaro.org/display/CTT/MPS2
Peripherals
- Serial: Connected to serial console or usb serial connected to host.
- Power: 12v
- Ethernet: One port connected.
- USB: Mini usb connected to host.
- Storage: SD card in an SD Mux.
Deployment
The technical reference manual can be found here.
An example health check with an image to use for deployment on MPS2 devices.
There is also access to a device dictionary which describes the process of using SDMux with the board.
In order to use SDMux, the host must have sd-mux-ctrl installed.
Troubleshooting
We found that the SD card containing the boot image easily got corrupted and that would take the board offline until manual intervention is made.
This is mitigated with use of the SDMux and there have been few known issues since.
SD Mux can be bought from https://shop.linux-automation.com/.
Musca B1
More details in Collaborate page: https://collaborate.linaro.org/display/CTT/MuscaB1
Flashing the device for the first time
Flashing instructions are available on ARM community pages. It's only possible to run the Windows version of the instructions. Currently the Lab uses QSPI firmware version 3.4.
Firmware: DAPLink_QSPI_V34.bin
After initial flashing is done, the rest of the setup can be done with a Linux host. Some commands for DAPLink can be found in DAPLink docs.
Turn on automation
Boards need to have the "automation" feature enabled in DAPLink. This is done by writing the auto_on.cfg file to the USB mass storage 'MUSCA_B' while pressing nSRST button.
See DAPLink docs above for more information.
Turn auto power on
There is a hidden command in the v3.4 firmware: Auto power can be turned on by writing auto_pwr.cfg to the USB mass storage 'MUSCA_B' while pressing nSRST button. Turning auto power off can be done by writing hard_pwr.cfg to the USB mass storage 'MUSCA_B' while pressing the nSRST button.
STM32L562E-DK
Peripherals
- Serial: Connected to serial console or usb serial connected to host.
- Power: ST-LINK, USB VBUS or external sources
- Ethernet:
- USB: USB Type-C
- Storage: microSD card
Deployment
An overview of this board, as well as a Programming and Debugging guide can be found on the zyphyrproject documentation page.
NXP LPC55s69 Platform
Peripherals
- Serial: UART and SPI port bridging from LPC55S69 target to USB via the onboard debug probe.
- Power: MicroUSB connector
- Ethernet:
- USB: 1 USB Full-Speed connector, 1 USB Hi-Speed connector, 1 USB Debug Probe connector, 1 USB Power connector
- Storage: Micro SD card slot (4-bit SDIO)
Deployment
The NXP Getting Started Guide can be used to build and run software.
Cypress Platform CY8CKIT-064S0S2-4343W
Peripherals
- Serial: debugger with USB-UART and USB-I2C bridge functionality
- Power: MicroUSB connector
- Ethernet:
- USB: micro-B connector for USB device interface for PSoC 64 MCU
- Storage: microSD Card holder
Deployment
The board specification can be found here.
For Programming and Debugging, the onboard KitProg3 can be used. It is a programmer/debugger with USB-UART and USB-I2C funcionality. For details on the KitProg3 functionality see the KitProg3 User Guide.
Troubleshooting
To Program/Debug connect the board to thh PC using the USB cable. It will enumerate as a USB Composite Device if you are connecting to your PC for the first time.
KitProg3 operates in either CMSIS-DAP Bulk mode, or DAPLink mode (default). In SMSIS-DAP Bulk mode, two UART interfaces are supported. The status LED (Yellow) is always ON in CMSIS-DAP Bulk mode and ramping at a rate of 2 Hz in DAPLink mode. Press and release the Mode select button (SW3) to switch between these modes.
See the KitProg3 User Guide for more troubleshooting instructions.
Asurada Chromebook
Peripherals
- Serial: Connected to serial console via SusyQable
- Power:
- Ethernet:
- USB: 1 USB-C port for debug, 1 USB-C port for charging
- Storage:
Deployment
The Asurada Chromebook should work out of the box; however there are Chromium OS docs for devoloper mode, as well as Closed Case Debug docs.
If you wish to flash a debug image you can use the following steps.
For CCD UART and flashing access, download the contents of this repository which contains scripts that automatically download and build required pieces.
- If these are installed on your machine, connect to the DUT via the SusyQable
- Start the servo daemon via
servod -b asurada. Ensure that the SusyQable is in the correct orientation described in the trouble shooting section. - Once the daemon has started leave it running in the background at all times for other steps.
- Start the servo daemon via
- Next you may need to "unlock" the CCD on the device, which is a one-time manual step to be done on each device.
- Connect to the UART of the "Cr50" chip in the device
- Run
dut-control cr50_uart_ptywhich should display the PTY number (such ascr50_uart_pty:/dev/pts/17) - Use your terminal emulator of choice to connect to the PTY (e.g.
minicom -w -D /dev/pts/17) - Once connected, type
ccd open - The device may ask you to press the power button several times in a 5 minute window, whenever it says "press PP button now!" quickly press the power button.
- When the process is completed enter
ccd reset factory
- With Servod running and CCD unlocked connect to the main SoC Uart
- Use
dut-control cpu_uart_ptyto find out the PTY number
- Use
- Use
flashrom -n -w <image file> -p raiden_debug_spi:target=APto flash an image file to the device - To replace an image with a different build you need the cbfstool utility
- navigate to util/cbfstool, and run
make - To replace the image remove the existing bl31.elf file
cbfstool <image file> remove -n fallback/bl31- Re-add a different version
cbfstool <image file> add-payload -n fallback/bl31 -f <new bl31.elf file>
- navigate to util/cbfstool, and run
Troubleshooting
When connecting to the Asurada Chromebook via the SusyQable, the DBG symbol should be in a upward position in the left USB-C port.
For more Chromebook devices you can look here. Currently the Asurada Chromebook is not on this list.
Lazor Chromebook
Peripherals
- Serial: Connected to serial console via SusyQable
- Power:
- Ethernet:
- USB: 1 USB-C port for debug, 1 USB-C port for charging
- Storage: 32 GB or 128 GB, and expandable storage via SD/MicroSD
- Ram: 4 GB or 8 GB
- CPU: Snapdragon 7c
Deployment
The Lazor Chromebook should work out of the box; however there are Chromium OS docs for devoloper mode, as well as Closed Case Debug docs.
If you wish to flash a debug image you can use the following steps.
For CCD UART and flashing access, download the contents of this repository which contains scripts that automatically download and build required pieces.
- If these are installed on your machine, connect to the DUT via the SusyQable
- Start the servo daemon via
servod -b trogdor. Ensure that the SusyQable is in the correct orientation described in the trouble shooting section. - Once the daemon has started leave it running in the background at all times for other steps.
- Start the servo daemon via
- Next you may need to "unlock" the CCD on the device, which is a one-time manual step to be done on each device.
- Connect to the UART of the "Cr50" chip in the device
- Run
dut-control cr50_uart_ptywhich should display the PTY number (such ascr50_uart_pty:/dev/pts/17) - Use your terminal emulator of choice to connect to the PTY (e.g.
minicom -w -D /dev/pts/17) - Once connected, type
ccd open - The device may ask you to press the power button several times in a 5 minute window, whenever it says "press PP button now!" quickly press the power button.
- When the process is completed enter
ccd reset factory
- With Servod running and CCD unlocked connect to the main SoC Uart
- Use
dut-control cpu_uart_ptyto find out the PTY number
- Use
- Use
flashrom -n -w <image file> -p raiden_debug_spi:target=APto flash an image file to the device - To replace an image with a different build you need the cbfstool utility
- navigate to util/cbfstool, and run
make - To replace the image remove the existing bl31.elf file
cbfstool <image file> remove -n fallback/bl31- Re-add a different version
cbfstool <image file> add-payload -n fallback/bl31 -f <new bl31.elf file>
- navigate to util/cbfstool, and run
Troubleshooting
When connecting to the Lazor Chromebook via the SusyQable, the DBG symbol should be in a downward position in the left USB-C port.
More board info can be found here.
Adding Boards to LAVA
"Adding a board to LAVA" can mean more than one thing, for example:
- Getting your device type supported in the LAVA software
- See section "Enabling new device in LAVA"
- Getting your physical board installed in Linaro's Cambridge Lab
Once your device type is supported in LAVA, and the needed LAVA version is deployed to the Lab, you are ready to request that physical boards be installed in the Lab.
Hardware Requirements
The Lab has some basic Hardware Requirements for boards being installed in the lab. It's advisable to read the "Automation and hardware design" and "LAB Device Deployment Guide" pages for more detailed information:
- https://collaborate.linaro.org/display/CTT/Automation+and+hardware+design
- https://collaborate.linaro.org/display/CTT/LAB+Device+Deployment+Guide
Basic requirements:
- The board must boot when power is supplied
- The Lab uses PDU switches to power cycle boards when needed
- The board must have a uniquely identifiable serial port
- If the board provides a 9 pin D-SUB, a suitable FTDI serial converter will provide this
- If the board provides a USB serial port, the Serial Number attribute of the USB port must be unique. If not, it may be possible to install a RaspberryPi dispatcher to isolate the board from the rest.
- The board must be able to be flashed in a reliable manner using automated tools
- No button presses or manual steps are permitted
- If your device boots via an SDcard, an SDmux can be used to reflash the board while it is powered off.
How to get your board installed in the Linaro Cambridge Lab
Once your board is supported in the LAVA software, and your board meets the Hardware Requirements, you can raise an LSS ticket to get your board installed in the Lab.
- Go to https://projects.linaro.org/secure/CreateIssue!default.jspa
- Fill in the drop down boxes:
- Project: LAB & System Software (LSS)
- Issue Type: Ticket
- Click Next
- Fill in the required details
- Summary: You should fill in the "Summary" with a descriptive title. It may be a good idea to prefix titles with "TF CI: " to help identify them in the list of issues.
- Components: "LAB"
- Client Stakeholder: "Trusted-Firmware"
- Validation Server: "tf.validation.linaro.org"
- Labels: "TrustedFirmware"
- Fill in the Description
- You will need to fill in the Description, even if you think the title is sufficient. Provide enough overview detail so the request is clear to understand by management, but make sure you include all the technical details you need for the support engineer to install your board.
- If you think you will need specific hardware, such as a dedicated dispatcher, an SDmux, etc. then please describe that here.
- Specify the type and number of boards you wish to be installed.
- Click the "Create" button at the bottom of the page
- Add Watchers
- It's probably a good idea to add Don Harbin to the Watchers on the ticket.
SQUAD
SQUAD is a frontend to LAVA, featuring a proxy for job submission, a database storing test results from LAVA jobs, and a dashboard where results can be compared across CI jobs and metrics generated.
The top level SQUAD project for TrustedFirmware is here:
https://qa-reports.linaro.org/tf/
TF-A
TF-A has several SQUAD projects, the most interesting is tf-a-main:
https://qa-reports.linaro.org/tf/tf-a-main/
There are other project, but the details
https://qa-reports.linaro.org/tf/tf-gerrit-tforg-l1/
https://qa-reports.linaro.org/tf/tf-gerrit-tforg-l2/
https://qa-reports.linaro.org/tf/tf-tftf-gerrit-tforg-l1/
https://qa-reports.linaro.org/tf/tf-tftf-gerrit-tforg-l2/
TF-M
https://qa-reports.linaro.org/tf/tf-m/
Staging Trusted Firmware System
This was documented here, but has been copied here as we approach wider review: https://docs.google.com/document/d/1qYEdhrYldBcnpVPNIYXG30n0CP8KUrF3DMq_EfAI43I/edit#heading=h.5y1mh3kp9xzw
Brief description of the setup
This document does not go into detail about each project, and is meant to be used as guidelines and rules for accessing the next environment.
Servers:
- Jenkins Server https://ci.staging.trustedfirmware.org/
- x86_64-TF-02 Jenkins Agent
- Git/Gerrit https://review.trustedfirmware.org/
The staging setup or “next” is meant to be used for developers to be able to test the CI infrastructure. The setup has been set up exactly the same as the production environment, the major difference between them is developers use a staging Jenkins server instead of the production server.
Rules & Environment setup
Staging environments have been set up in the next/* namespace location: https://git.trustedfirmware.org/next.
The next/* namespace is mirrored from production. The only repository that are not mirrored are the tf-*-job-configs and ci-yadp-builder repos. Their history will diverge and content needs to be updated manually. The dockerfiles repository is shared so take extra care with it.
Users need to be placed in the trusted-firmware-staging-approvers Gerrit group. Since we use the role-based authorization on both the Production and the Staging Jenkins, beside the trusted-firmware-staging-approvers Gerrit group, user need to be a member of the trusted-firmware-a-openci-users GitHub team for the TF-A project, the trusted-firmware-m-openci-users GitHub team for the TF-M project, the trusted-firmware-hafnium-openci-users GitHub team, or trusted-firmware-mbed-tls-openci-users Github team for the Mbed-TLS project in order to gain the permission to access the job.
This is done by creating a ticket, please see instructions at the bottom of the Open CI wiki page. The trusted-firmware-staging-approvers Gerrit group allows users to have submit and merge (+2) writes to all repositories under the next/* namespace, without needing any approval from a peer.
Due to the nature of allowing users to self approve their submit/merge changes into Gerrit, it is important that users understand that it triggers Jenkins jobs and as such care has to be taken when deploying those changes.
Basic rules all developers should follow:
- The job needs to include "tf-a-", "tf-m-", "hafnium-", or "mbedtls-" as a part of the job name for the correct project.
- Gerrit triggers and comments have to be disabled in the job. We do not want the staging server sending comments back to Gerrit reviews.
- Job triggers have to be manual only. Timed events are not allowed, not unless it is being used for testing.
- Developers must use their own job config, and not use master. Users must copy the job config, prepend their username and work on that config.
How to setup a basic next environment
You have two options:
- you can either clone the repo again from the /next/ location
- or add a remote to your existing clone of the production repo.
It might be easier to just add a /next/ remote to the user's existing repo clone and work from that. However, the /next/ has had the “basic rules” applied, and as such it is important that the user does not mix them up and break these rules.
To add a remote, it is simply necessary to add /next/ the url. So
ssh://bhcopeland@review.trustedfirmware.org:29418/ci/tf-m-job-configs becomes
ssh://bhcopeland@review.trustedfirmware.org:29418/next/ci/tf-m-job-configs. This then can be added with ‘git remote add gerrit-next
ssh://bhcopeland@review.trustedfirmware.org:29418/next/ci/tf-m-job-configs’ or cloned via git clone <url>.
Once a remote has been added, the user can then do git fetch gerrit-next and then checkout to a branch on it.
Sample script to clone the repositories:
#!/bin/sh
set -e
username=bhcopeland
for project in tf-a-ci-scripts tf-a-job-configs tf-m-ci-scripts tf-m-job-configs; do
git clone "ssh://${username}@review.trustedfirmware.org:29418/ci/${project}"
cd ${project}
git remote add gerrit-next ssh://${username}@review.trustedfirmware.org:29418/next/ci/${project}
git fetch gerrit-next
cd ..
done
It's recommended that the user read https://jigarius.com/blog/multiple-git-remote-repositories for understanding two remotes.
Once in this environment, you can work as normal. All changes go to the master branch which is global for everyone so please take care.
Setting up and testing jobs
As the job-configs repositories are not automatically kept up to date, you should synchronize the normal jobs to what's upstream making sure to keep any trigger related changes already in the next copy (to comply with the rules above).
Now you can copy the <job_name>.yaml file and prepend your username, resulting in bhcopeland-tf-a-builder.yaml for example. To give yourself permissions to manually trigger and cancel your jobs, you need the following:
- authorization:
anonymous:
- job-read
- job-extended-read
bhcopeland:
- job-read
- job-extended-read
- job-build
- job-cancel
This is most easily done by adding it to a <username>-authorization.yaml.inc. Every job should have something that looks like this:
- authorization:
!include: authorization.yaml.inc
You need to change the filename to the one you just created to apply the permissions.
By now it should be apparent that jobs and files have dependencies among themselves like the authorization file above. Making a personal copy will keep any references to the original (production mirror) jobs. If you want to modify subjobs, you need to change all references too. For example the tf-a-ci-gateway job will spawn a tf-ci-builder. There should be an entry along the lines of the following, which you need to update.
- trigger-builds:
- project:
- tf-a-builder
It is important to note here, the user needs to replace bhcopeland with your own GitHub username. Additionally, runs will usually submit jobs to LAVA. Bigger jobs (like the tf-a-main) need to have their own project on https://qa-reports.linaro.org/tf/. Please speak to Linaro if your jobs requires it. Custom builders/gateways usually don't require this.
Other things you might want to do is prune big jobs. They have many multijob fields so removing some is recommended if you don't need them.
Please ensure any triggers (timed based etc) are disabled. And please ensure silent: true is set inside the gerrit trigger so no gerrit comments get triggered. This should be the case if you started from the next version of the job configs.
You can now submit your job configs to gerrit. The bot should do a sanity check and give you +1 automatically (retrying is possible by pushing a modified patch, git rebase --ignore-date HEAD^ will do that without actually changing anything). You can give code review +2 yourself and submit the change at your leisure (assuming you were granted permissions as above). If you navigate to https://ci.staging.trustedfirmware.org/ you should be able see and run your jobs. Although the staging environment is separate from the production setup, please be careful running big jobs as they run on the same hardware and could bottleneck production!
Workflow for other repositories
Other repositories, that are used inside the jobs, can be copied to other server (for example git.linaro.org). This should be added as a new remote to the existing repository. After changes are made and work well, they should be sent for review. Example below:

Similar workflow should be used when migrating changes to ci/tf-a-scripts and ci/tf-a-job-configs repositories. Changes in the next/* should be sent for review against repositories in the ci/* path.
As noted above, changes in next/tf-a-job-configs can be self approved and merged. Changes in user repositories can be pushed without reviews.
Uploading files into shared repository
For those files that are prerequisites for CI execution, i.e. SCP RAM, Code Coverage FVP plugin, etc. are shared through https://downloads.trustedfirmware.org and tuxput is the service which allows users to directly upload to S3 without having AWS credentials into the latter site.
Tuxput Installation
The tpcli command is distributed as part of the tuxput python package. To
install the latest version, run:
$ pip install -U tuxput
Upload A File
Example:
$ tpcli -t <token> -b openci-trustedfirmware-storage-prod https://publish.trustedfirmware.org/upload/path/on/server file
where tuxput instance's endpoint is at https://publish.trustedfirmware.org/upload/.*
Anything specified after the upload/ is interpreted as a folder to use for the file that has been uploaded. If you have permission to write to that path and the folder doesn't exist then it is created. If the upload target is a directory instead of a file, tpcli recurses through the directory and add it to the folder prefix. When tuxput has finished attempting to upload, it prints out a list of the results for each file. Successful uploads reports as HTTP 204, and if it was unsuccessful the error message will be displayed.
Examples
- Single file upload:
$ touch sample.txt
$ tpcli -t <token> -b openci-trustedfirmware-storage-prod https://publish.trustedfirmware.org/upload/demo sample.txt
produces:
https://downloads.trustedfirmware.org/demo/sample.txt
- Directory upload:
$ mkdir demo2
$ mkdir demo2/sub
$ touch demo2/sample1.txt
$ touch demo2/sub/sample2.txt
$ tpcli -t <token> -b openci-trustedfirmware-storage-prod https://publish.trustedfirmware.org/upload demo2
produces:
https://downloads.trustedfirmware.org/demo2/sample1.txt
https://downloads.trustedfirmware.org/demo2/sub/sample2.txt
- Directory upload with a new folder in the path:
$ mkdir demo2
$ mkdir demo2/sub
$ touch demo2/sample1.txt
$ touch demo2/sub/sample2.txt
$ tpcli -t <token> -b openci-trustedfirmware-storage-prod https://publish.trustedfirmware.org/upload/builds/202105 demo2
produces:
https://downloads.trustedfirmware.org/builds/202105/demo2/sample1.txt
https://downloads.trustedfirmware.org/builds/202105/demo2/sub/sample2.txt
Obtaining a token
In order to obtain a token, please open an LSS ticket.
Overwrite a file
The ability to overwrite previous uploads has been enabled on this instance of tuxput.
Delete a file
Tuxput does not currently offer a way to delete a file. If you need a file or folder deleted, please submit an LSS ticket so that we can manually remove it.
Future Updates
The project is being hosted at https://gitlab.com/Linaro/tuxput .If you run into a bug or have a feature request, please submit it there.
FVP Docker Images
LAVA is used to launch FVP (Fast Models) based on CI artifacts. In turn, models are launched inside a containerized environment. In other words, models are not run from a bare metal host system, but inside containers on a LAVA dispatcher, where these are launched by LAVA using CI artifacts and configured model parameters. In case a new FVP Docker Image is required at the CI, a contributor needs to download the corresponding FVP model tarball, the installer, and upload it to a CI private repository, then a CI job would automatically generate the docker image.
FVP Models
FVP model are commonly available at these sites:
Download the required model, e.g. FVP_Base_RevC-2xAEMvA_11.15_14.tgz. Once download is completed, install tuxput
package and run the following command using your personal token
tpcli -t <token> -b openci-trustedfirmware-fvp-prod https://publish.trustedfirmware.org/upload <fvp model>
for the case of the FVP_Base_RevC-2xAEMvA_11.15_14.tgz, command becomes
tpcli -t <token> -b openci-trustedfirmware-fvp-prod https://publish.trustedfirmware.org/upload FVP_Base_RevC-2xAEMvA_11.15_14.tgz
If no errors are seen, the corresponding CI job would detect this new model in the repository and automatically creates the corresponding docker image. This is a cron job executed in a daily basis but can be also triggered manually: go to the CI job landing page and just click the 'Build now' icon.
Non-public build dependencies
TrustedFirmware build process (as run in OpenCI) may require various private or not public-available dependencies (this includes dependencies which require click-thru license approval before downloading). An example would be proprietary toolchains, builds with which should be tested in addition to open-source toolchains.
To facilitate use of such build dependencies, the openci-trustedfirmware-private-prod
Tuxput bucket was created. Non-public build dependencies should be uploaded
in a subdirectory of that bucket, based on their category. We will informally
call it a sub-bucket below.
An example of sub-bucket is openci-trustedfirmware-private-prod/armclang, which is used
to store "Arm Compiler for Embedded" toolchains (also known as Arm Clang).
Managing Arm Clang toolchains
Arm Clang toolchains can be downloaded from the following link: https://developer.arm.com/downloads/view/ACOMPE, which requires active Arm Developer site account, multi-factor authentication, compliance with restrictions and license terms acceptance.
For usage in the CI, Arm Clang toolchain packages should be stored in
openci-trustedfirmware-private-prod/armclang sub-bucket.
As an example, if the download site shows the information like:
Arm Compiler 6.13 for Linux 64-bit
Name: DS500-BN-00026-r5p0-15rel0
Description: Arm Compiler 6.13 for Linux 64-bit
Filename: ARMCompiler6.13_standalone_linux-x86_64.tar.gz
then you would download file ARMCompiler6.13_standalone_linux-x86_64.tar.gz,
then upload it to the sub-bucket as follows:
tpcli -t <token> -b openci-trustedfirmware-private-prod https://publish.trustedfirmware.org/upload/armclang/ ARMCompiler6.13_standalone_linux-x86_64.tar.gz
(Note: There used to be older convention to (re)name installation tarballs to match internal product identifier ("Name:" field in the data example above). This convention is now deprecated, as it led only to confusion. However, in the actual bucket contains you still may see historical packages with the older naming convention.)
At the time of Docker image build, contents of the openci-trustedfirmware-private-prod/armclang
sub-bucket are fetched in the root directory of the
https://git.trustedfirmware.org/ci/dockerfiles.git/tree/
checkout. For example, it would be:
dockerfiles
|
+- ARMCompiler6.13_standalone_linux-x86_64.tar.gz
\- bionic-amd64-tf-a-build
|
+- build.sh
\- Dockerfile
Each Docker image which needs to use a particular toolchain, should
copy it from the parent directory into the image's directory, using suitable
commands in its build.sh script, e.g.:
cp ../ARMCompiler6.13_standalone_linux-x86_64.tar.gz .
(Note: it should be copy and not move, because other images may refer to the same file.)
After that, Dockerfile can refer to the ARMCompiler6.13_standalone_linux-x86_64.tar.gz file
as usual (e.g. in a COPY statement).
Misc Info
LAVA Ready
This section documents the high-level guidelines and expectations when a TrustedFirmware Member wishes to put a board into the OpenCI board farm. This board farm is located in the Linaro facility near Cambridge, UK. A section of the Linaro lab has been allocated to trustedfirmware.org. All trustedfirmware boards are collocated on racks dedicated to the project.
The general steps/guidelines for getting hardware placed into the lab is as follows:
- Review the documentation herein including the OpenCI users guide and the Best Practices for Getting Devices into LAVA tutorial
- Create a ticket for the particular platform in the OpenCI Jira Project
- Use a supported LAVA device type name for platform and put that in the ticket. Each board is required to have a device type in OpenCI that is also unique.
- Note that creating new "tickets" requires the appropriate access permissions.
- An OpenCI Triage/Prioritization meeting is held weekly and can be attended by any members. This meeting prioritizes the OpenCI backlog to determine the work items to be added on an ongoing basis. Adding hardware to the lab is one of the tasks competing for cycle time of the OpenCI development team. This is why the next step is very important and benefits the entire OpenCI buildout.
- Deliver a "LAVA Ready" package when it's wanted to add hardware to the OpenCI hardware farm. This includes the following:
- 5 identical platforms of the type wanting to place into the lab;
- Mailing address here: Linaro Ltd, Harston Mill, Royston Road, Harston, Cambridge, CB22 7GG, United Kingdom
- Develop and validate the LAVA Device_Type in a local lab first to assure the board is enabled. This is preferably upstreamed into the LAVA project. This is the development of a YAML file describing how LAVA can interact to the device thru multiple scenarios like rescue, serial, power cycle, boot flow, etc...
- Provide any information on how to health check the device. Typically a set of boot checks, verifying that the board comes up to a prompt, or firmware version as some examples
- Provide an Automation Guide: This includes the things about the device that will cause automation complexities. Examples might be power control, ways to interact w/ UART, cooling expectations, powering (USB or other), uniquely identifiable before f/w is up.
- Delivery of all items (except the hardware) to the OpenCI development team will help them to size the effort and more accurately plan the team's activity pipeline.
- Once adding the device to the lab is approved through the OpenCI triage prioritization efforts, the hardware can be sent to the lab for installation.
- Note that if multiple vendors are requesting to place platforms into the OpenCI or multiple platforms into the OpenCI, the requests shall be prioritized by the TrustedFirmware Board.